Hojin Lee
Munich Institute of Robotics and Machine Intelligence (MIRMI), Technical University of Munich (TUM)

Carl-Zeiss-Straße 8
Munich, 85748
My research focuses on uncertainty quantification, adaptive and robust learning-based systems, active learning for perception and planning, representation learning in unstructured environments, hierarchical reinforcement learning, and human-in-the-loop reinforcement learning for robotic applications.
I received my Ph.D. in Mechanical Engineering from the High Assurance Mobility Control Lab at the Ulsan National Institute of Science and Technology (UNIST), Republic of Korea, where I worked on uncertainty-aware planning and control for autonomous systems.
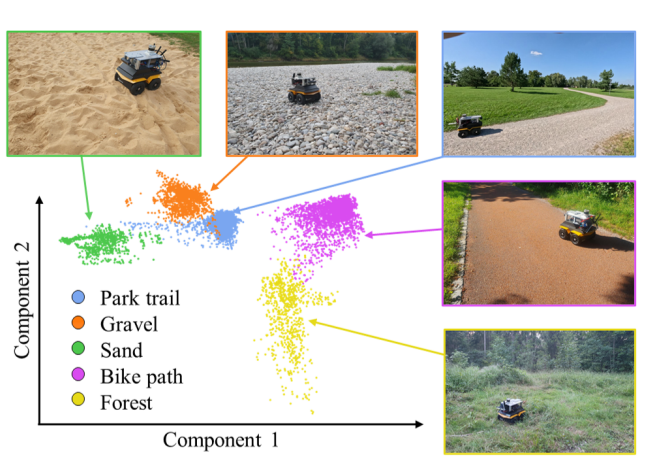
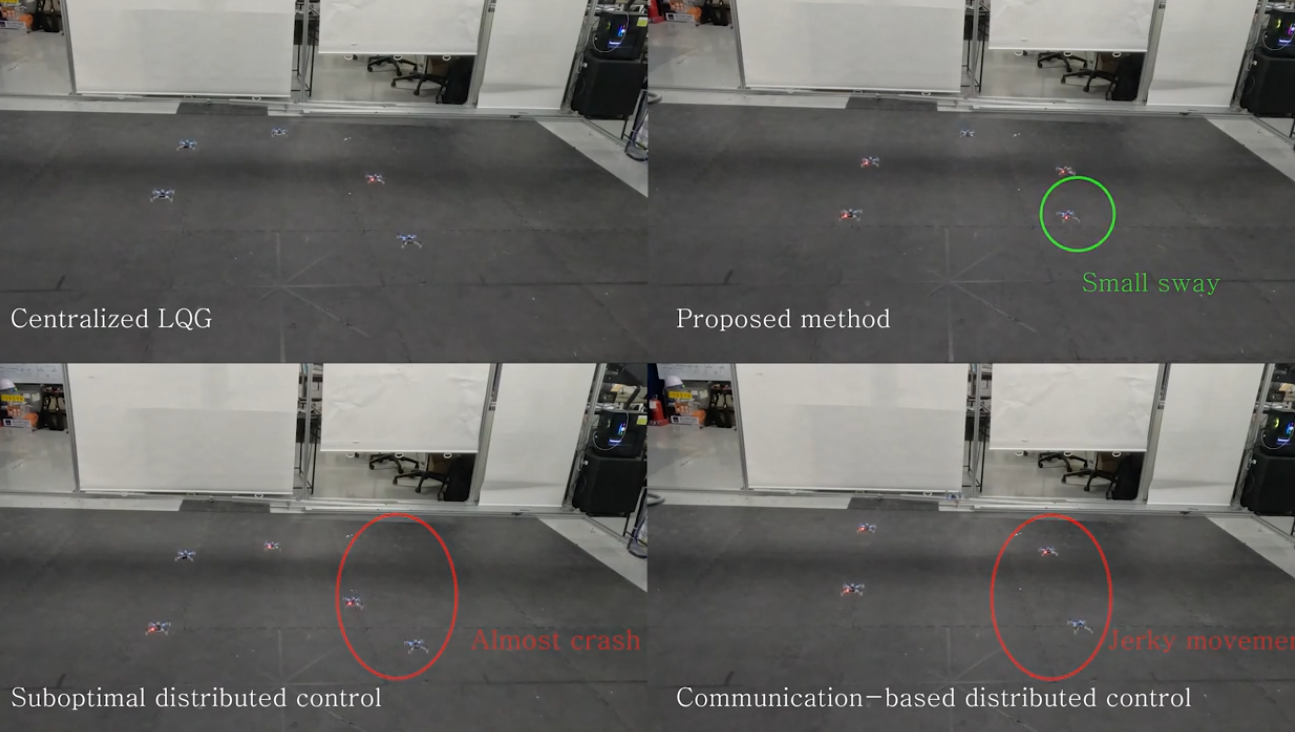
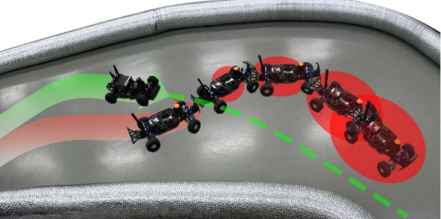
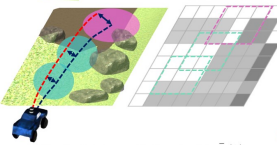
My previous research includes distributed optimal control and estimation for multi-agent systems, agent-to-agent interaction prediction and intent inference, off-road navigation, and continual learning for autonomous systems.